
Pédagogie par projet
La mention ASE, ainsi que chacun de ses parcours, est organisée selon une ligne de force autour de la pédagogie par projet. Par rapport aux UE classiques (disciplinaires), la part des UE de type projet s'accentue au cours des semestres (de 5 ECTS en S1 à 20 ECTS en S4) ce qui permet aux étudiants de progresser vers le travail autonome attendu à la sortie du Master.
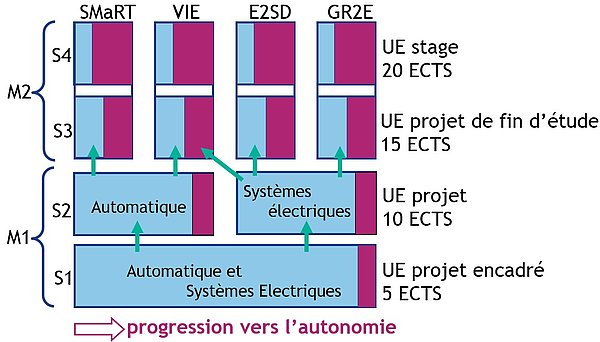
Le master ASE est basé sur une pédagogie par projet. La part des UE de type projet s'accentue au cours des semestres de 5 ECTS en S1 à 20 ECTS en S4.
UE "Projet Encadré" en S1
Au semestre 1 du Master ASE, dans l'UE "projet encadré", 3 thèmes aux choix sont proposés :
Electrotechnique
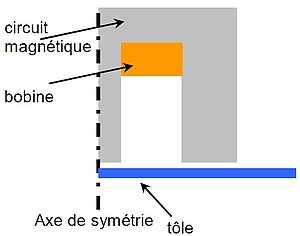
Dimensionnement de systèmes électrotechniques (transformateur et machine synchrone)
Prototype numérique,
Introduction à l'optimisation,
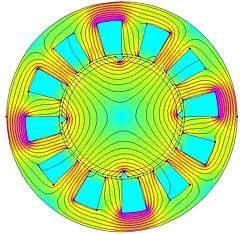
Etude de la commande de la machine synchrone.
Induction magnétique dans une machine synchrone
Electronique de puissance
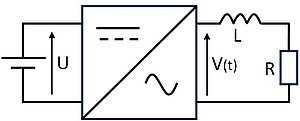
Etude et simulation de différents convertisseurs (hacheur, onduleur, ...),
Etude des commandes des convertisseurs,
Dimensionnement d'une inductance de lissage, validation par prototypage virtuel.
Onduleur alimentant une charge RL

Automatique
Découverte de la robotique,
Modélisation du robot et Identification de paramètres,
Suivi d'une trajectoire,
Initiations à la notion de traitements temps réel,
Etude de capteurs.
UE "Projet" en S2
Au semestre 2 du Master ASE, l'UE "projet" compte pour 10 ECTS.
Exemples de sujet proposé dans le parcours "Systèmes Electriques" :

Simulation énergétique de la Renault Zoé
Dans le cadre du projet CUMIN (Campus Universitaire à Mobilité Innovante et Neutre en carbone), l’Université de Lille vise à mettre en place un démonstrateur de mini-cité basée sur l’électro-mobilité. L’objectif de ce projet est de réaliser la simulation énergétique du VE Renault Zoé afin de pour réaliser son étude selon différents scénarios dans le cadre de CUMIN.
Renault Zoé de Polytech Lille
Dimensionnement et étude d’un système à lévitation magnétique
La lévitation magnétique permet de maintenir à une distance donnée un objet magnétique d’un autre. Cette idée est utilisée pour développer de nombreux dispositifs. Par exemple, pour le transport, des trains circulent sans contact avec des rails. L’objectif est de dimensionner et d’étudier un système à lévitation magnétique académique.
Système de lévitation magnétique simple
Exemples de sujet proposé dans le parcours "Automatique" :
Identification de timbres-poste par analyse d’image
La reconnaissance automatique d’objets par analyse d’image vise à détecter la présence d’une instance (ex. une personne donnée) ou une classe d’objets (ex. un piéton) dans une image numérique. L’une des applications majeures est la recherche d’image par le contenu.
L'objectif de ce projet est de tester différentes approches sur la reconnaissance de timbres poste.
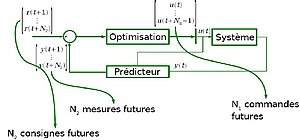
Commande prédictive basée sur le modèle
Le principe de la commande prédictive basée sur le modèle (MPC pour Model Predictive Control) consiste à utiliser des prédictions des sorties futures du procédé pour déterminer la meilleure commande tout en respectant les contraintes. A chaque instant, l’évolution future du procédé est prédite à partir d’un modèle mathématique du processus. L'objectif de ce projet est de concevoir une commande prédictive sur un processus thermique.
UE "Projet de fin d'étude" en S3
Au semestre 3 du Master ASE, pour chaque parcours (GR2E, E2SD, SMaRT ou VIE), l'UE "projet de fin d'étude" compte pour 15 ETCS.
Exemples de sujet proposé en M2 GR2E :
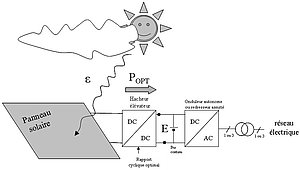
Utilisation de cellules solaires avec stockage d'énergie
Une centrale solaire est constituée de panneaux solaires et de convertisseurs. Pour optimiser la récupération d’énergie, on utilise des batteries de stockage. L'objectif du projet est l’étude complète de la chaîne de conversion d’énergie, en partant de l’éclairement reçu par le panneau jusqu’à l’énergie renvoyée au réseau.

Dimensionnement et mise en œuvre d’un nanogrid
Les réseaux électriques terrestres sont actuellement un des éléments clefs du système électrique. La majeure partie de la production électrique est aujourd’hui centralisée, l’équilibre en temps réel entre l’offre et la demande est le garant de la stabilité de ce système. L’apparition des « réseaux électriques intelligents » (ou « Smart Grids ») va complètement faire évoluer la conduite des réseaux électriques. L’objectif du projet est de mettre au point un démonstrateur à échelle homothétique d’un nanoréseau électrique.
Exemples de sujet proposé en M2 E2SD :
Tactile feedback: a new device for multi-touch interaction
Touch is a unique human sensory modality in that it enables a bidirectional flow of energy and information between the real, or virtual, environment and the end user. Touchscreen electronic devices, such as smartphones, tablets, become an integral part of our life. Our fingers play the main role in control of them by sliding or trapping. The main objective of the project is to study a control method, allows having a differentiated tactile stimulation, using squeeze film effect to obtain different sensations for the use of more than two fingers simultaneously.
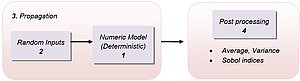
Study of stochastic response surface method and sparse collocation method for uncertainty propagation
The fields of numerical analysis and scientific computing have been in great development lately. The introduction of efficient computers have helped to achieve the massive use of mathematical models and extensive research have been conducted to optimize the use of these models. In this scientific project, the focus will be on quantifying the uncertainties that propagate for the input to the output through a mathematical model. Some class of methods used in this purpose will be investigated in the case of electrical machine.
Exemples de sujet proposé en M2 SMaRT :

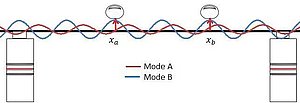
Modélisation et contrôle d'un système aérodynamique
La plate-forme expérimentale se compose de deux rotors aux extrémités d’un axe et commandé par deux moteurs. Ces deux moteurs commandent les positions verticale et horizontale de l’axe. Les sorties mesurées sont les angles de déviations de l’axe selon les deux composantes de roulis et tangage. Cette plateforme est couplée à la carte contrôleur permettant l’implantation en ligne des algorithmes de commande et d’estimation.
Le but du projet est d'implémenter et de comparer différentes lois de commande sur le dispositif proposé.

Détecteur d’obstacles et Géo-référencement d’un modèle 3D
L’objectif est de participer à la préparation d’un test en grandeur nature et en temps réel d’un détecteur d’obstacles. Les capteurs utilisés sont un GPS, une caméra et un modèle 3D. Une réplique virtuelle du détecteur sera réalisée avec les capteurs virtuels du logiciel SCANeR Studio. Ce dernier servira également comme un système d’information géographique pour la version réelle du détecteur d’obstacles. Un modèle 3D de l’environnement de Polytech’Lille sur le campus de l’université Lille1 sera mis à disposition.
Exemples de sujet proposé en M2 VIE :
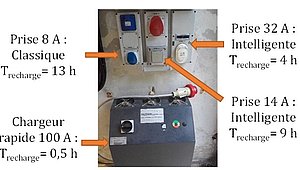
Impact de la stratégie de recharge sur les performances d’un véhicule électrique
Le projet CUMIN vise à fermer le campus aux véhicules thermiques et n’autoriser que des véhicules électriques dont la charge serait réalisée par des systèmes à énergie renouvelable. La stratégie de charge est une donnée critique pour les performances des batteries. Un compromis doit être fait entre la rapidité de la charge (confort du propriétaire) et les performances du stockage et de la restitution de l’énergie. L’objectif est de modéliser les différents systèmes de recharge et de coupler ces systèmes au pack de batterie de la Tazzari Zero.

Emulation d’un véhicule hybride parallèle
Les chaines des tractions hybrides se développent de plus en plus dans l’industrie. Elles sont plus complexes que les chaînes de traction électriques ou thermiques. Des validations partielles sont donc nécessaires lors de la réalisation des véhicules. Si la simulation logicielle est une étape importante, des validations de sous-systèmes et de commandes sur bancs expérimentaux sont d’autres étapes importantes. On parle d’émulation de la chaîne de traction ou d’HIL simulation (Hardware-In-the-Loop). L’objectif de ce projet est de réaliser un émulateur de véhicule hybride parallèle.